DH ROBOTICS SERVO SÄHKÖKÄYTTÖINEN TARTTURI PGE-SARJA – PGE-2-12 Kapea sähköinen rinnakkaistarttuin



Pääkategoria
Teollisuusrobotin käsivarsi / Yhteistyörobotin käsivarsi / Sähköinen tarttuja / Älykäs toimilaite / Automaatioratkaisut
Hakemus
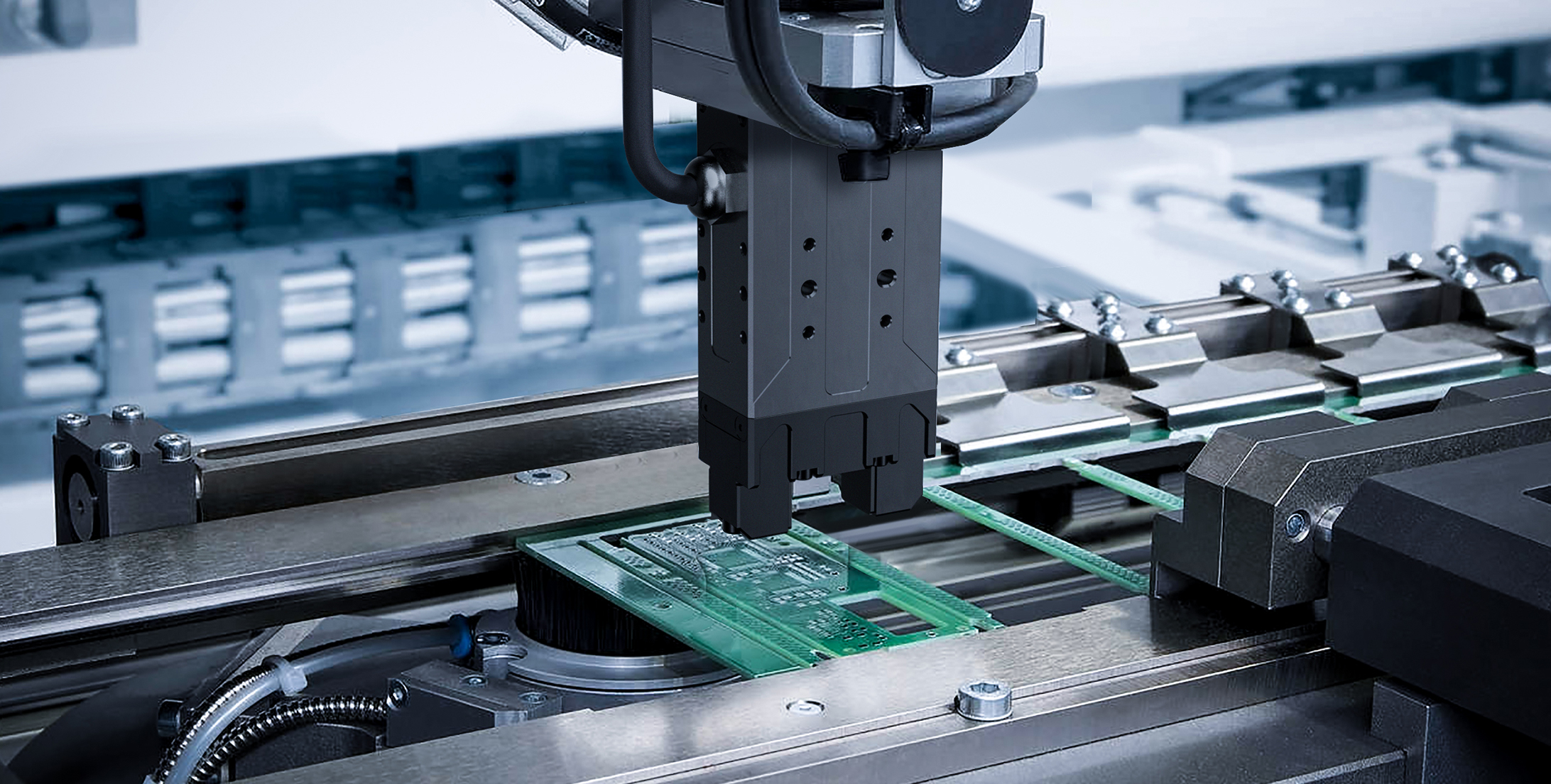
PGE-sarja on teollisuuskäyttöön tarkoitettu kapea sähköinen rinnakkaispihti. Tarkan voimanhallinnan, kompaktin koon ja suuren työskentelynopeuden ansiosta siitä on tullut teollisuussähköisten tarttujien "kuuma myyntituote".
Ominaisuus
✔ Integroitu muotoilu
✔ Säädettävät parametrit
✔ Älykäs palaute
✔ Vaihdettava sormenpää
✔ IP40-suojausluokka
✔ Käyttö -30 ℃ matalassa lämpötilassa
✔ CE-sertifiointi
✔ FCC-sertifiointi
✔ RoHs-sertifiointi
Pieni koko | Joustava asennus
Ohuin koko on 18 mm ja kompakti rakenne, tukee vähintään viittä joustavaa asennusmenetelmää kiinnitystehtävien tarpeisiin ja säästää suunnittelutilaa.
Suuri työskentelynopeus
Nopein avautumis- ja sulkeutumisaika voi olla 0,2 s / 0,2 s, mikä täyttää tuotantolinjan nopeat ja vakaat kiinnitysvaatimukset.
Tarkka voimanhallinta
Erityisen ajurin suunnittelun ja ajoalgoritmin kompensoinnin ansiosta tartuntavoimaa voidaan säätää jatkuvasti ja voiman toistettavuus voi olla jopa 0,1 N.



Spesifikaatioparametri
Tuoteparametrit
| PGE-2-12 | PGE-5-26 | PGE-8-14 | PGE-15-10 | PGE-15-26 | PGE-50-26 | PGE-50-40 | PGE-100-26 | |
|---|---|---|---|---|---|---|---|---|
 |  |  |  |  |  |  |  | |
| Tartuntavoima (leukakohtainen) | 0,8–2 N | 0,8–5 N | 2–8 N | 6–15 pohjoista | 6–15 pohjoista | 15–50 N | 15–50 N | 30–50 N |
| Aivohalvaus | 12 mm | 26 mm | 14 mm | 10 mm | 26 mm | 26 mm | 40 mm | 26 mm |
| Suositeltu työkappaleen paino | 0,05 kg | 0,1 kg | 0,1 kg | 0,25 kg | 0,25 kg | 1 kg | 1 kg | 2 kg |
| Avautumis-/sulkemisaika | 0,15 sekuntia/0,15 sekuntia | 0,3 sekuntia/0,3 sekuntia | 0,3 sekuntia/0,3 sekuntia | 0,3 sekuntia/0,3 sekuntia | 0,5 sekuntia/0,5 sekuntia | 0,45 sekuntia/0,45 sekuntia | 0,6 s/0,6 s | 0,5 sekuntia/0,5 sekuntia |
| Toistotarkkuus (sijainti) | ± 0,02 mm | ± 0,02 mm | ± 0,02 mm | ± 0,02 mm | ± 0,02 mm | ± 0,02 mm | ± 0,02 mm | ± 0,02 mm |
| Melupäästöt | <50 dB | |||||||
| Paino | 0,15 kg | 0,4 kg | 0,4 kg | 0,155 kg | 0,33 kg | 0,4 kg | 0,4 kg | 0,55 kg |
| Ajotapa | Hammastanko ja hammaspyörä + ristirullaohjain | Hammastanko ja hammaspyörä + ristirullaohjain | Hammasratas ja lineaariohjain | Tarkkuusplaneettavaihteisto + Hammastanko ja hammaspyörä | Tarkkuusplaneettavaihteisto + Hammastanko ja hammaspyörä | Tarkkuusplaneettavaihteisto + Hammastanko ja hammaspyörä | Tarkkuusplaneettavaihteisto + Hammastanko ja hammaspyörä | Tarkkuusplaneettavaihteisto + Hammastanko ja hammaspyörä |
| Koko | 65 mm x 39 mm x 18 mm | 95 mm x 55 mm x 26 mm (ilman jarrua) 113,5 mm x 55 mm x 26 mm (jarrulla) | 97 mm x 62 mm x 31 mm | 89 mm x 30 mm x 18 mm | 86,5 mm x 55 mm x 26 mm (ilman jarrua) 107,5 mm x 55 mm x 26 mm (jarrulla) | 97 mm x 55 mm x 29 mm (ilman jarrua) 118 mm x 55 mm x 29 mm (jarrulla) | 97 mm x 55 mm x 29 mm (ilman jarrua) 118 mm x 55 mm x 29 mm (jarrulla) | 125 mm x 57 mm x 30 mm |
| Viestintäliitäntä | Vakio: Modbus RTU (RS485), digitaalinen tulo/lähtö Valinnainen: TCP/IP, USB 2.0, CAN 2.0A, PROFINET, EtherCAT | |||||||
| Nimellisjännite | 24 V DC ± 10 % | 24 V DC ± 10 % | 24 V DC ± 10 % | 24 V DC ± 10 % | 24 V DC ± 10 % | 24 V DC ± 10 % | 24 V DC ± 10 % | 24 V DC ± 10 % |
| Nimellisvirta | 0,2 A | 0,4 A | 0,4 A | 0,1 A | 0,25 A | 0,25 A | 0,25 A | 0,3 A |
| Huippuvirta | 0,5 A | 0,7 A | 0,7 A | 0,22 A | 0,5 A | 0,5 A | 0,5 A | 1,2 A |
| IP-luokka | IP40 | IP40 | IP40 | IP40 | IP40 | IP40 | IP40 | IP40 |
| Suositeltu ympäristö | 0–40 °C, alle 85 % suhteellinen kosteus | |||||||
| Sertifiointi | CE, FCC, RoHS | |||||||
Liiketoimintamme


Tuotekategoriat
-

DH ROBOTICS SERVO SÄHKÖINEN TARTTURI RGD-SARJA –...
-

DH ROBOTICS SERVO SÄHKÖINEN TARTTURI PGE-SARJA –...
-

DH ROBOTICS SERVO SÄHKÖKÄYTTÖINEN TARTTURI CG-SARJA – ...
-

HITBOT SÄHKÖKÄYTTÖINEN TARTTURI – SARJA – Z-EFG-C3...
-
-300x255-300x300.png)
DH ROBOTICS SERVO SÄHKÖINEN TARTTURI PGHL-SARJA ...
-

DH ROBOTICS SERVO SÄHKÖINEN TARTTURI AG-SARJA – ...