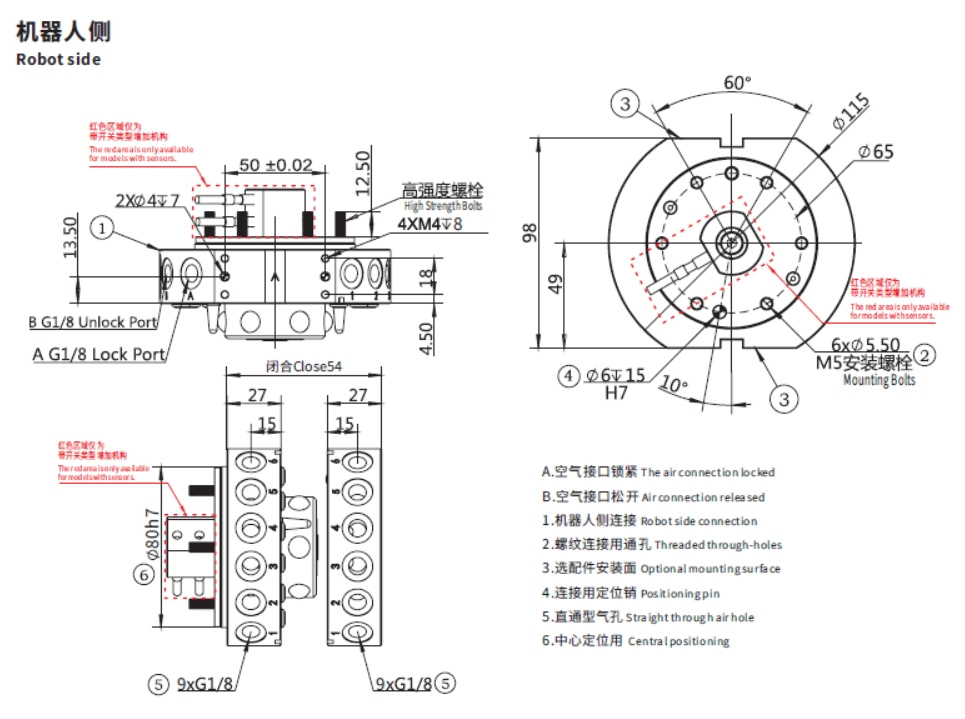
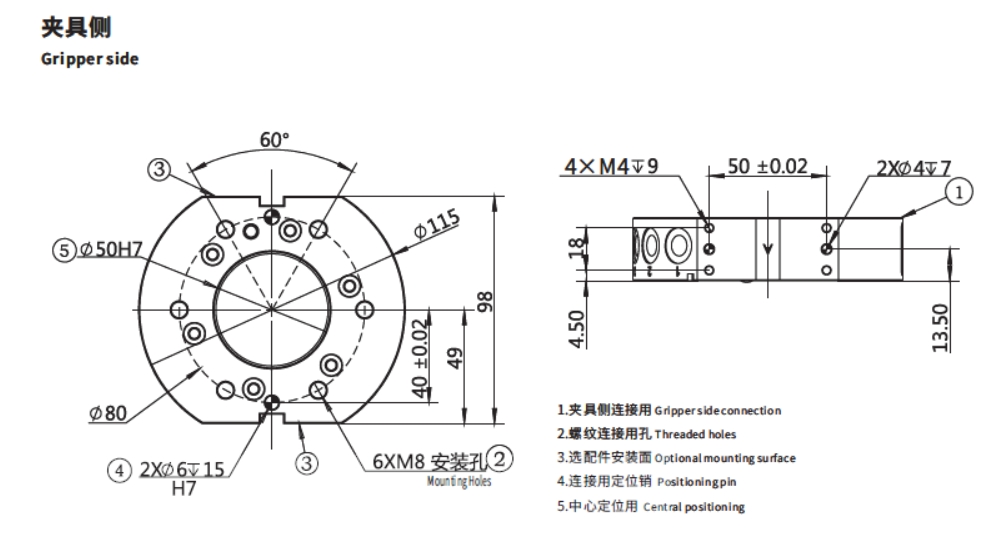
PIKAVAIHTOLAITESARJA – QCA-50 Robotin päässä oleva pikavaihtolaite



Pääkategoria
Robottityökalunvaihtaja / Päätytyökalunvaihtaja (EOAT) / Pikavaihtojärjestelmä / Automaattinen työkalunvaihtaja / Robottityökalujen käyttöliittymä / Robotin puoli / Tarttujan puoli / Työkalujen joustavuus / Pikavapautus / Pneumaattinen työkalunvaihtaja / Sähköinen työkalunvaihtaja / Hydraulinen työkalunvaihtaja / Tarkkuustyökalunvaihtaja / Turvalukitusmekanismi / Päätytyökalu / Automaatio / Työkalunvaihdon tehokkuus / Työkalunvaihto / Teollisuusautomaatio / Robottipäätytyökalut / Modulaarinen rakenne
Hakemus
End-of-Arm Tooling (EOAT) -työkaluja käytetään laajalti esimerkiksi autoteollisuudessa, 3C-elektroniikassa, logistiikassa, ruiskuvalussa, elintarvike- ja lääkepakkauksissa sekä metallinjalostuksessa. Sen päätoimintoja ovat työkappaleiden käsittely, hitsaus, ruiskutus, tarkastus ja nopea työkalunvaihto. EOAT parantaa merkittävästi tuotannon tehokkuutta, joustavuutta ja tuotteiden laatua, mikä tekee siitä olennaisen osan nykyaikaista teollisuusautomaatiota.
Ominaisuus
Korkea tarkkuus
Männän säätökahvan puolella on paikannustoiminto, joka takaa suuren toistopaikannustarkkuuden. Miljoonan syklin testit osoittavat, että todellinen tarkkuus on paljon suositeltua arvoa korkeampi.
Korkea lujuus
Lukitusmäntä ja sen suuri sylinterin halkaisija takaavat voimakkaan lukitusvoiman ja SCIC-robottipäädyn pikalukituksen. Lukittaessa ei tapahdu tärinää suuren liikkeen vuoksi, mikä estää lukituksen epäonnistumisen ja varmistaa toistuvan paikannustarkkuuden.
Korkea suorituskyky
Lukitusmekanismi, jossa on monikartiomainen pintarakenne, pitkäikäiset tiivistyskomponentit ja korkealaatuinen elastinen kosketusanturi, varmistavat signaalimoduulin tiiviin kosketuksen.



Spesifikaatioparametri
| Pikavaihtosarja | ||||
| Malli | Suurin hyötykuorma | Kaasupolku | Lukitusvoima @ 80Psi (5,5 bar) | Tuotteen paino |
| QCA-05 | 5 kg | 6-M5 | 620N | 0,4 kg |
| QCA-05 | 5 kg | 6-M5 | 620N | 0,3 kg |
| QCA-15 | 15 kg | 6-M5 | 1150N | 0,3 kg |
| QCA-25 | 25 kg | 12-M5 | 2400N | 1,0 kg |
| QCA-35 | 35 kg | 8-G1/8 | 2900N | 1,4 kg |
| QCA-50 | 50 kg | 9-G1/8 | 4600N | 1,7 kg |
| QCA-S50 | 50 kg | 8-G1/8 | 5650N | 1,9 kg |
| QCA-100 | 100 kg | 7-G3/8 | 12000N | 5,2 kg |
| QCA-S100 | 100 kg | 5-G3/8 | 12000N | 3,7 kg |
| QCA-S150 | 150 kg | 8-G3/8 | 12000N | 6,2 kg |
| QCA-200 | 300 kg | 12-G3/8 | 16000N | 9,0 kg |
| QCA-200D1 | 300 kg | 8-G3/8 | 16000N | 9,0 kg |
| QCA-S350 | 350 kg | / | 31000N | 9,4 kg |
| QCA-S500 | 500 kg | / | 37800N | 23,4 kg |

Robotin puolella

Tarttuvan puolen

Robotin puoleinen hihnakytkin
Sovellettava moduuli
Moduulin tyyppi
| Tuotteen nimi | Malli | PN | Käyttöjännite | Työvirta | Liitin | Liittimen PN-numero |
| Robotin puoleinen signaalimoduuli | QCSM-15R2 | 7.Y00468 | 24 V | 2,5 A | D-Sub15R2-1000① | 1.Y10080 |
| Tarttujan puoleinen signaalimoduuli | QCSM-15G2 | 7.Y00469 | 24 V | 2,5 A | D-Sub15G2-1000① | 1.Y10081 |
| Robotin puoleinen signaalimoduuli | QCSM-08R | 7.Y00477 | 380 V | 30A | 3108A22-23S② | 1.Y10710 |
| Tarttujan puoleinen signaalimoduuli | QCSM-08G | 7.Y00478 | 380 V | 30A | 3108A22-23P② | 1.Y10711 |
| Robotin puoleinen signaalimoduuli | QCSM-19R | 7.Y00954 | 220 V | 3A | MS3116F14-19S/-Y② | 1.Y11420 |
| Robotin puoleinen signaalimoduuli | QCSM-19R | 7.Y00954 | 220 V | 3A | CMB08E-14-19S(072)SR-B② | 1.Y11863 |
| Robotin puoleinen signaalimoduuli | QCSM-19R1 | 7.Y02123 | 220 V | 3A | MS3116F14-19S/-Y② | 1.Y11420 |
| Robotin puoleinen signaalimoduuli | QCSM-19R1 | 7.Y02123 | 220 V | 3A | CMB08E-14-19S(072)SR-B② | 1.Y11863 |
| Tarttujan puoleinen signaalimoduuli | QCSM-19G | 7.Y00955 | 220 V | 3A | MS3116F14-19P/-Y② | 1.Y11419 |
| Tarttujan puoleinen signaalimoduuli | QCSM-19G | 7.Y00955 | 220 V | 3A | CMB08E-14-19P(072)SR-B② | 1.Y11864 |
| Robotin puoleinen signaalimoduuli | QCSM-26R | 7.Y00464 | 220 V | 3A | MS3116F16-26S/-Y② | 1.Y11867 |
| Robotin puoleinen signaalimoduuli | QCSM-26R | 7.Y00464 | 220 V | 3A | CMB08E-16-26S(072)SR-B② | 1.Y11865 |
| Tarttujan puoleinen signaalimoduuli | QCSM-26G | 7.Y00465 | 220 V | 3A | MS3116F16-26P/-Y② | 1.Y11369 |
| Tarttujan puoleinen signaalimoduuli | QCSM-26G | 7.Y00465 | 220 V | 3A | CMB08E-16-26P(072)SR-B② | 1.Y11866 |
| Tarttujan puoleinen signaalimoduuli | QCSM-21/26G | 7.Y02117 | 220 V | 3A | MS3116F16-26P/-Y② | 1.Y11369 |
| Tarttujan puoleinen signaalimoduuli | QCSM-21/26G | 7.Y02117 | 220 V | 3A | CMB08E-16-26P(072)SR-B② | 1.Y11866 |
| Robotin puoleinen signaalimoduuli | QCSM-32R | 7.Y02095 | 220 V | 3A | MS3116F22-36S② | 1.Y13392 |
| Robotin puoleinen signaalimoduuli | QCSM-32R | 7.Y02095 | 220 V | 3A | MS3118F22-36S② | 1.Y13393 |
| Tarttujan puoleinen signaalimoduuli | QCSM-32G | 7.Y02096 | 220 V | 3A | MS3116F22-36P② | 1.Y13394 |
| Tarttujan puoleinen signaalimoduuli | QCSM-32G | 7.Y02096 | 220 V | 3A | MS3118F22-36P② | 1.Y13395 |
①Kaapelin pituus on 1 metri ②Vain liitos, ei johtoa
Pneumaattinen laajennusmoduuli
| Tuotteen nimi | Malli | PN | Kaasupolku | Kierrereikä |
| Robotin puoleinen pneumaattinen laajennusmoduuli | QCAM-06G18R | 7.Y01015 | 6 | G1/8 |
| Tarttuimen puoleinen pneumaattinen jatkomoduuli | QCAM-06G18G | 7.Y01016 | 6 | G1/8 |
| Robotin puoleinen pneumaattinen laajennusmoduuli | QCAM-06G18R-E | 7.Y01018 | 6 | G1/8 |
| Tarttuimen puoleinen pneumaattinen jatkomoduuli | QCAM-06G18G-E | 7.Y01019 | 6 | G1/8 |
| Robotin puoleinen pneumaattinen laajennusmoduuli | QCAM-10M5R | 7.Y01053 | 10 | M5 |
| Tarttuimen puoleinen pneumaattinen jatkomoduuli | QCAM-10M5G | 7.Y01054 | 10 | M5 |
| Robotin puoleinen pneumaattinen laajennusmoduuli | QCAM-14M5R | 7.Y01055 | 14 | M5 |
| Tarttuimen puoleinen pneumaattinen jatkomoduuli | QCAM-14M5G | 7.Y01056 | 14 | M5 |
| Robotin puolella itseään julistava pneumaattinen laajennusmoduuli | QCAM-06G18R-F | 7.Y02005 | 6 | G1/8 |
| Tarttuvan puolen itse julistama pneumaattinen jatkomoduuli | QCAM-06G18G-F | 7.Y02006 | 6 | G1/8 |
| Robotin puoleinen pneumaattinen laajennusmoduuli | QCAM-04G38R | 7.Y02043 | 4 | G3/8 |
| Tarttuimen puoleinen pneumaattinen jatkomoduuli | QCAM-04G38G | 7.Y02044 | 4 | G3/8 |
Korkean taajuuden moduulityyppi
| Tuotteen nimi | Malli | PN | Käyttöjännite | Työvirta |
| Robotin puoleinen signaalimoduuli | QCHFM-E14-C1R | 7.Y02003 | 1,4 kV | 5A |
| Tarttuimen puoleinen signaalimoduuli | QCHFM-E14-C1G | 7.Y02004 | 1,4 kV | 5A |
Signaalimoduuli (verkkokaapeliliitäntä)
| Tuotteen nimi | Malli | PN |
| Robotin puoleinen signaalimoduuli | QCSM-RJ45-06R | 7.Y02007 |
| Tarttujan puoleinen signaalimoduuli | QCSM-RJ45-06G | 7.Y02008 |
Servo-tehomoduuli
| Tuotteen nimi | Malli | PN |
| Robotin puoleinen servomoottorimoduuli | QCSM-08R1 | 7.Y02080 |
| Tarttuimen puoleinen servomoottorimoduuli | QCSM-08G1 | 7.Y02081 |
Servosignaalimoduuli
| Tuotteen nimi | Malli | PN |
| Robotin puoleinen servosignaalimoduuli | QCSM-12R | 7.Y02082 |
| Tarttuimen puoleinen servosignaalimoduuli | QCSM-12G | 7.Y02083 |
Itsetiivistyvä neste-ilmamoduuli
| Tuotteen nimi | Malli | PN |
| Robotin puoleinen signaalimoduuli | QCWM-02R | 7.Y02049 |
| Tarttujan puoleinen signaalimoduuli | QCWM-02G | 7.Y02050 |
Liiketoimintamme


Tuotekategoriat
-

DH ROBOTICS SERVO SÄHKÖINEN TARTTURI AG-SARJA – ...
-

DH ROBOTICS SERVO SÄHKÖINEN TARTTURI RGD-SARJA –...
-

DH ROBOTICS SERVO SÄHKÖINEN TARTTURI RGD-SARJA –...
-

DH ROBOTICS SERVO SÄHKÖINEN TARTTURI PGC-SARJA –...
-

DH ROBOTICS SERVO SÄHKÖINEN TARTTURI RGD-SARJA –...
-

DH ROBOTICS SERVO SÄHKÖINEN TARTTURI RGI-SARJA –...