Yhteistyörobotti (Erc 612m/Erc 612) Kuusi vapausastetta
Yhteistyörobotti (Erc 612m/Erc 612) Kuusi vapausastetta
Pääkategoria
Teollisuusrobotin käsivarsi / Yhteistyörobotin käsivarsi / Sähköinen tarttuja / Älykäs toimilaite / Automaatioratkaisut
Hakemus
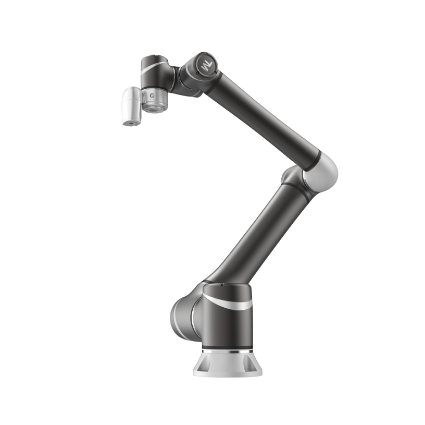
TM12:lla on robottisarjamme pisin ulottuvuus, mikä mahdollistaa yhteistyöhön perustuvan toiminnan jopa sovelluksissa, jotka vaativat teollisuustason tarkkuutta ja nostokykyä. Siinä on useita ominaisuuksia, joiden ansiosta sitä voidaan käyttää turvallisesti ihmisten lähellä ilman, että tarvitaan tilaa vieviä esteitä tai aitoja. TM12 on erinomainen valinta yhteistyörobottien automatisointiin joustavuuden parantamiseksi ja...tuottavuus.
Luokkansa johtavan konenäköjärjestelmän, edistyneen tekoälyteknologian, kattavan turvallisuuden ja helpon käytön ansiostaTekoälyinen yhteistyöbotti vie liiketoimintaasi pidemmälle kuin koskaan.Vie automaatio uudelle tasolle tehostamalla tuottavuutta, parantamalla laatua ja vähentämällä kustannuksia.
Ominaisuudet
ÄLYKÄS
Tulevaisuudenkestävä yhteistyörobottisi tekoälyn avulla
• Automaattinen optinen tarkastus (AOI)
• Laadunvarmistus ja johdonmukaisuus
• Lisää tuotannon tehokkuutta
• Alenna käyttökustannuksia
YKSINKERTAINEN
Ei vaadita kokemusta
• Graafinen käyttöliittymä helppoa ohjelmointia varten
• Prosessiorientoitunut editointityönkulku
• Yksinkertainen käsinohjaus asentojen opetukseen
• Nopea visuaalinen kalibrointi kalibrointilevyllä
TURVALLINEN
Yhteistyössä tehty turvallisuus on meille tärkeää
• Täyttää standardien ISO 10218-1:2011 ja ISO/TS 15066:2016 vaatimukset
• Törmäyksen havaitseminen hätäpysäytyksellä
• Säästä kustannuksia ja tilaa aidoille ja esteille
• Aseta nopeusrajoituksia yhteistyötilalle
Tekoälyllä toimivat cobotit tunnistavat ympäristönsä ja osien läsnäolon ja suunnan visuaalisten tarkastusten ja dynaamisten keräily- ja sijoitustehtävien suorittamiseksi. Voit käyttää tekoälyä vaivattomasti tuotantolinjalla ja lisätä tuottavuutta, vähentää kustannuksia ja lyhentää sykliaikoja. Tekoälynäkö voi myös lukea tuloksia koneista tai testauslaitteista ja tehdä asianmukaisia päätöksiä sen mukaisesti.
Automaatioprosessien parantamisen lisäksi tekoälypohjainen cobotti voi seurata, analysoida ja integroida dataa tuotannon aikana ehkäistäkseen virheitä ja parantaakseen tuotteiden laatua. Paranna tehtaan automaatiota helposti täydellisellä tekoälyteknologian kokoonpanolla.
Yhteistyörobottimme on varustettu integroidulla näköjärjestelmällä, jonka avulla cobotit pystyvät havaitsemaan ympäristöään, mikä parantaa merkittävästi cobottien ominaisuuksia. Robotin näkö eli kyky "nähdä" ja tulkita visuaalista dataa komentokehotteiksi on yksi ominaisuuksista, jotka tekevät meistä ylivoimaisia. Se on mullistava tekijä tehtävien tarkassa suorittamisessa dynaamisesti muuttuvissa työtiloissa, sujuvoittaen toimintoja ja tehostaen automatisointiprosesseja.
Ensikertalaisille käyttäjille suunniteltuna ohjelmointiosaaminen ei ole edellytys tekoälyyhteistyörobotin käytön aloittamiselle. Intuitiivinen napsauttamalla ja vetämällä toimiva liike flow-ohjelmointiohjelmistollamme vähentää monimutkaisuutta. Patentoitu teknologiamme mahdollistaa käyttäjille, joilla ei ole koodauskokemusta, jopa viiden minuutin projektin ohjelmoinnin.
Sisäänrakennetut turva-anturit pysäyttävät tekoälycobotin, kun fyysinen kontakti havaitaan, mikä minimoi mahdolliset vahingot ja luo paineettoman ja turvallisen ympäristön. Voit myös asettaa robotille nopeusrajoituksia, jotta sitä voidaan käyttää erilaisissa ympäristöissä aivan työntekijöiden vieressä.
Aiheeseen liittyvät tuotteet



Spesifikaatioparametri
| Malli | TM12 | |
| Paino | 32,8 kg | |
| Suurin hyötykuorma | 12 kg | |
| Ulottuvuus | 1300 mm | |
| Nivelalueet | J1, J6 | ±270° |
| J2, J4, J5 | ±180° | |
| J3 | ±166° | |
| Nopeus | J1, J2 | 120°/s |
| J3 | 180°/s | |
| J4 | 180°/s | |
| J5 | 180°/s | |
| J6 | 180°/s | |
| Tyypillinen nopeus | 1,3 m/s | |
| Maks. nopeus | 4 m/s | |
| Toistettavuus | ± 0,1 mm | |
| Vapausaste | 6 pyörimisniveltä | |
| I/O | Ohjausrasia | Digitaalinen tulo: 16 Digitaalinen lähtö: 16 Analoginen tulo: 2 Analoginen lähtö: 1 |
| Työkalun liitäntä | Digitaalinen tulo: 4 Digitaalinen lähtö: 4 Analoginen tulo: 1 Analoginen lähtö: 0 | |
| I/O-virtalähde | 24 V 2,0 A ohjausrasialle ja 24 V 1,5 A työkalulle | |
| IP-luokitus | IP54 (robottikäsivarsi); IP32 (ohjausrasia) | |
| Virrankulutus | Tyypillinen 300 wattia | |
| Lämpötila | Robotti voi toimia 0–50 ℃:n lämpötilassa | |
| Puhtaus | ISO-luokka 3 | |
| Virtalähde | 100–240 V AC, 50–60 Hz | |
| I/O-liitäntä | 3xCOM, 1xHDMI, 3xLAN, 4xUSB2.0, 2xUSB3.0 | |
| Viestintä | RS232, Ethernet, Modbus TCP/RTU (master ja slave), PROFINET (valinnainen), EtherNet/IP (valinnainen) | |
| Ohjelmointiympäristö | TMflow, vuokaaviopohjainen | |
| Sertifiointi | CE, SEMI S2 (lisävaruste) | |
| Tekoäly ja visio*(1) | ||
| Tekoälytoiminto | Luokittelu, objektien tunnistus, segmentointi, poikkeamien tunnistus, tekoäly-OCR | |
| Hakemus | Paikannus, 1D/2D-viivakoodinluku, OCR, viantunnistus, mittaus, kokoonpanotarkistus | |
| Paikannustarkkuus | 2D-paikannus: 0,1 mm*(2) | |
| Silmä kädessä (sisäänrakennettu) | Automaattisesti tarkentunut värikamera 5 megapikselin resoluutiolla, työskentelyetäisyys 100 mm ~ ∞ | |
| Silmästä käteen (valinnainen) | Tukee enintään kahta GigE 2D-kameraa tai yhtä GigE 2D-kameraa + yhtä 3D-kameraa*(3) | |
| *(1)Saatavilla on myös TM12X, TM14X, TM16X ja TM20X -robottikäsivarsia ilman sisäänrakennettua konenäköä. *(2)Tämän taulukon tiedot on mittannut TM-laboratorio ja työskentelyetäisyys on 100 mm. On huomattava, että käytännön sovelluksissa asiaankuuluvat arvot voivat poiketa toisistaan johtuen tekijöistä, kuten paikan päällä olevasta ympäröivästä valonlähteestä, kohteen ominaisuuksista ja konenäköohjelmointimenetelmistä, jotka vaikuttavat tarkkuuden muutokseen. *(3)Katso TM Robotin kanssa yhteensopivat kameramallit TM Plug & Playn viralliselta verkkosivustolta. | ||
Liiketoimintamme


Tuotekategoriat
-

1000 kg:n älykäs lasernavigointisähköautomaatti...
-

4-akselinen SCARA-robottivarsi 3c-teollisuudelle
-

Kilpailukykyinen hinta Teollisuusrobotti 6-akselinen manip...
-

6-akselinen robottivarsi 10 kg:n yhteistyörobotti Hyvä hinnoittelu Maala...
-
Teollinen 6-akselinen yhteistyörobotti, 10 kg:n hyöty...
-
Hitsausrobotit Robot Hwashi 6-akselinen puristushitsaus...