HITBOT SÄHKÖKAHVA -SARJA – Z-EFG-R Yhteistyöhön perustuva sähköinen tarttuja



Pääkategoria
Teollisuusrobotin käsivarsi / Yhteistyörobotin käsivarsi / Sähköinen tarttuja / Älykäs toimilaite / Automaatioratkaisut
Hakemus
SCIC Z-EFG -sarjan robottitarraimet ovat kooltaan pieniä ja niissä on sisäänrakennettu servojärjestelmä, joka mahdollistaa nopeuden, asennon ja puristusvoiman tarkan hallinnan. SCICin huippuluokan tartuntajärjestelmä automaatioratkaisuihin avaa uusia mahdollisuuksia tehtävien automatisointiin, joita et olisi koskaan uskonut mahdolliseksi.

Ominaisuus

·Pieni mutta tehokas servomoottorilla varustettu sähköinen tarttuja.
·Liittimet voidaan vaihtaa vastaamaan erilaisia projektivaatimuksia.
·Voisi nostaa hauraita ja muotoaan muuttavia esineitä, kuten munia, koeputkia, renkaita jne.
·Sopii paikkoihin, joissa ei ole ilmalähteitä (kuten laboratoriot ja sairaalat).
Integroitu servojärjestelmä soveltuu erilaisiin pyyntöihin
Suuri puristusvoima
Puristusvoima: 80 N,
iskunpituus: 20 mm
Tarkkuuden säätö
Toistettavuus: ±0,02 mm
Kytke ja käytä
Erityisesti suunniteltukuusiakselinen sähköinen tarttuja
Ohjain on sisäänrakennettu
Pienen alueen peitto, kätevä integroida.
Häntää voidaan vaihtaa
Sen häntää voidaan muuttaa erilaisiin pyyntöihin.
Pehmeä kiinnitys
Se voi kiinnittää herkkiä esineitä

● Edistää vallankumousta pneumaattisten tarttujien korvaamisessa sähköisillä tarttujilla, Kiinan ensimmäinen sähköinen tarttuja, jossa on integroitu servojärjestelmä.
● Täydellinen korvaaja ilmakompressorille + suodattimelle + solenoidiventtiilille + kaasuläpälle + pneumaattiselle tarttujalle
● Useiden syklien käyttöikä, joka on yhdenmukainen perinteisen japanilaisen sylinterin kanssa




Spesifikaatioparametri
Z-EFG-R on robottikäyttöinen sähköinen tarttuja, jossa on sisäänrakennettu ohjain ja useita toimintoja yhdessä. Pieni kooltaan, mutta tehokas toiminnoiltaan.
● Pieni mutta tehokas servomoottorilla varustettu sähköinen tarttuja.
●Liittimet voidaan vaihtaa vastaamaan erilaisia projektivaatimuksia.
● Voi nostaa ilmaan hauraita ja muotoaan muuttavia esineitä, kuten munia, koeputkia, renkaita jne.
● Sopii paikkoihin, joissa ei ole ilmalähteitä (kuten laboratoriot ja sairaalat).
Z-EFG-R on pieni sähkökäyttöinen tarttuja, jossa on integroitu servojärjestelmä. Se voi korvata pumpun + suodattimen + elektronimagneettisen arvon + kaasuventtiilin + ilmatarttujan.
| Mallinumero Z-EFG-R | Parametrit |
| Kokonaisisku | 20 mm |
| Tartuntavoima | 80N |
| Toistettavuus | ±0,02 mm |
| Suositeltu tartuntapaino | 0,8 kg |
| Lähetystapa | Vaihdelaatikko + ristirullaohjain |
| Liikkuvien osien rasvan täyttö | Kuuden kuukauden välein tai miljoona liikettä / kerta |
| Yksisuuntaisen iskun liikkeen aika | 0,45 sekuntia |
| Käyttölämpötila-alue | 5–55 ℃ |
| Käyttökosteusalue | RH35-80 (ei jäätymistä) |
| Liikkumistila | Kaksi sormea liikkuu vaakasuunnassa |
| Iskunvaimennuksen hallinta | Säädettävä |
| Puristusvoiman säätö | Säädettävä |
| Paino | 0,5 kg |
| Mitat (P * L * K) | 68 * 68 * 132,7 mm |
| Ohjaimen sijoittelu | Sisäänrakennettu |
| Voima | 5W |
| Moottorin tyyppi | DC-harjaton |
| Nimellisjännite | 24 V |
| Huippuvirta | 1A |
| Mukautuva kuusiakselinen robottivarsi | UR, Aubo |
Ajo ja ohjain ovat sisäänrakennettuja
Z-EFG-R on pieni sähkökäyttöinen tarttuja, jossa on integroitu servojärjestelmä. Se voi korvata ilmapumpun + suodattimen + elektronimagneettiventtiilin + kaasuläpän + ilmatarttujan.


Yhteensopiva kuusiakselisen robottikäsivarren kanssa
Tarttuin voi olla yhteensopiva valtavirran kuusiakselisen robottivarren kanssa, jotta se on plug and play -valmis. Sen iskunpituus on 20 mm, puristusvoima 80 N ja sen iskunpituutta ja puristusvoimaa voidaan säätää.
Pieni hahmo, joustava asentaa
Z-EFG-R:n koko on P 68 * L 68 * K 132,7 mm, sen rakenne on kompakti ja tukee useita asennusmenetelmiä. Sisäänrakennettu ohjain vie vähän tilaa, ja sitä on helppo soveltaa erilaisiin kiinnitystehtäviin.

Nopea reagointi, tarkkuuden hallinta
Lyhin yksittäisen iskun liikeaika on 0,45 sekuntia, sen toistettavuus on ±0,02 mm, sen häntäosaa voidaan vaihtaa helposti, ja asiakkaat voivat kiinnittää esineen pyynnöstä.
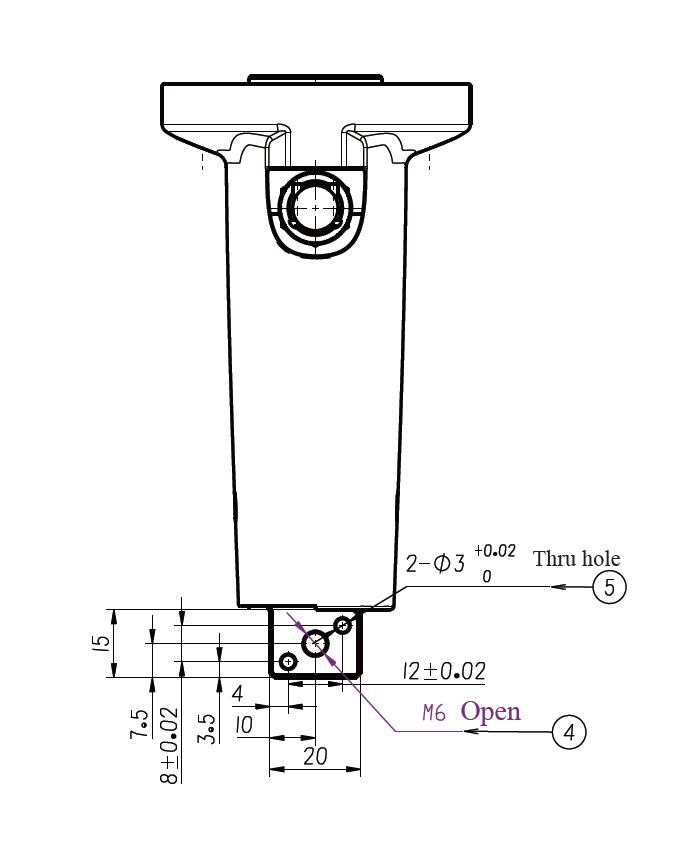
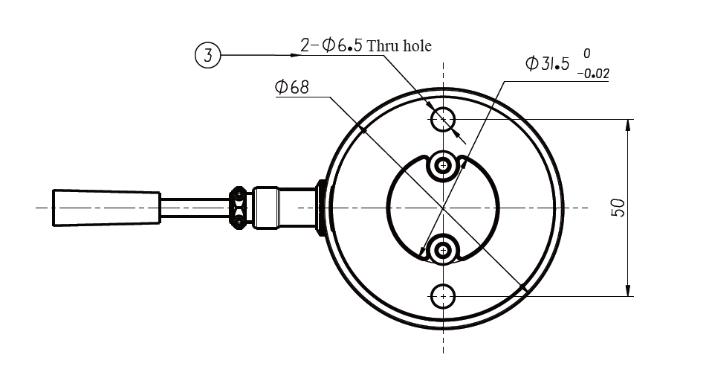
Mitta-asennuskaavio
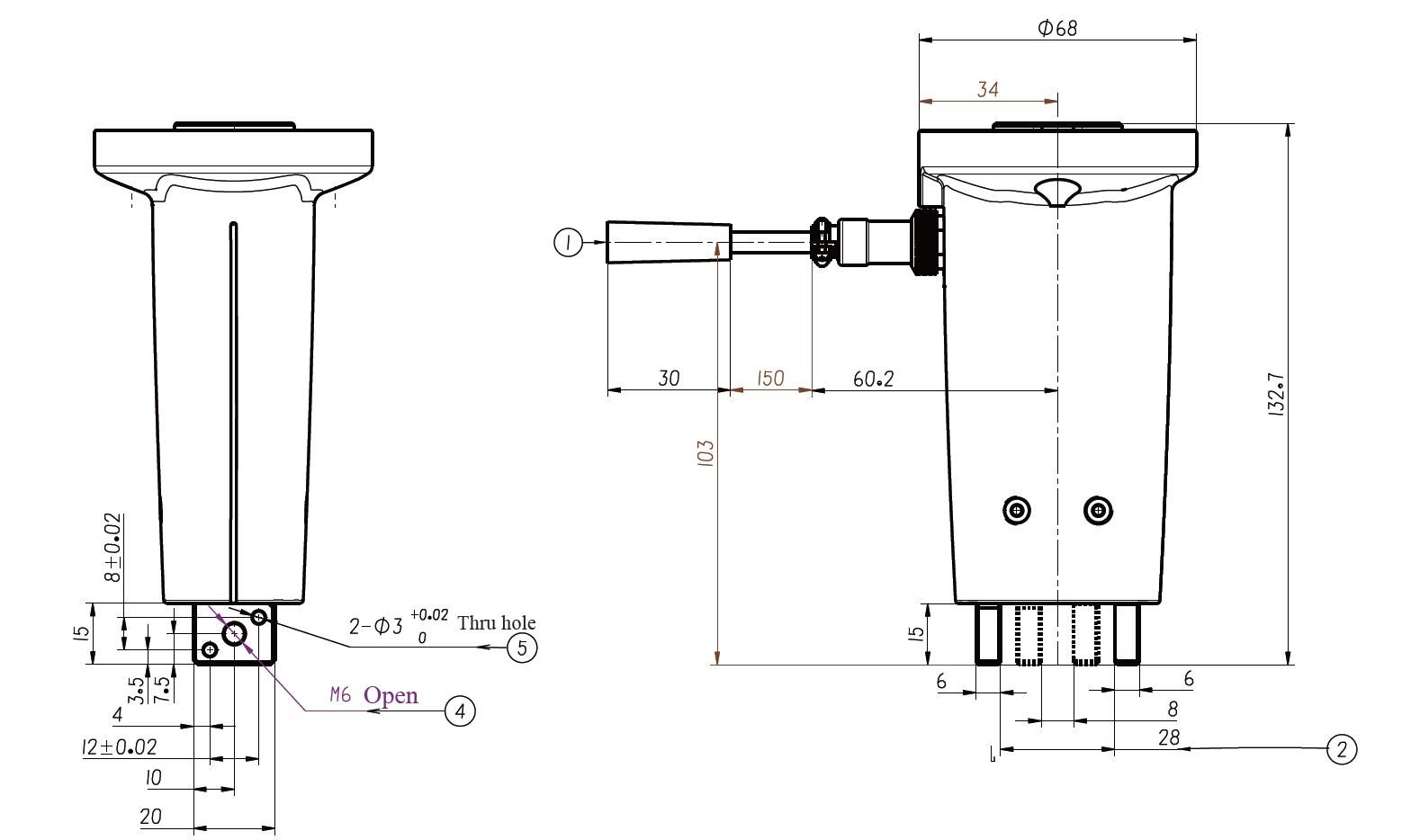
① RKMV8-354 Viisijohtiminen ilmailuliitin RKMV8-354:ään
② Sähköisen tarttujan iskunpituus on 20 mm
③ Asennusasento, käytä kahta M6-ruuvia kiinnittääksesi UR-robottivarren päässä olevaan laippaan
④ Asennusasento, kiinnittimen asennusasento (M6-ruuvi)
⑤ Asennusasento, kiinnittimen asennusasento (3 lieriömäistä tapinreikää)
Sähköiset parametrit
Nimellisjännite 24 ± 2 V
Virta 0,4 A

Liiketoimintamme


Tuotekategoriat
-

DH ROBOTICS SERVO SÄHKÖINEN TARTTURI PGE-SARJA –...
-

DH ROBOTICS SERVO SÄHKÖINEN TARTTURI RGI-SARJA –...
-

DH ROBOTICS SERVO SÄHKÖINEN TARTTURI PGE-SARJA –...
-

HITBOT SÄHKÖINEN TARTURISARJA – Z-EFG-50 Paral...
-

DH ROBOTICS SERVO SÄHKÖINEN TARTTURI RGI-SARJA –...
-

HITBOT SÄHKÖKÄYTTÖINEN TARTTURI -SARJA – Z-EFG-40...