SCARA-ROBOTTIKÄDET – Z-Arm-4160B -yhteistyörobottikäsivarsi





Pääkategoria
Teollisuusrobotin käsivarsi / Yhteistyörobotin käsivarsi / Sähköinen tarttuja / Älykäs toimilaite / Automaatioratkaisut
Hakemus
SCIC Z-Arm -cobotit ovat kevyitä neliakselisia yhteistyörobotteja, joissa on sisäänrakennettu käyttömoottori. Ne eivät enää vaadi alennusvaihteita kuten muut perinteiset scara-robotit, mikä alentaa kustannuksia 40 %. SCIC Z-Arm -cobotit voivat toteuttaa toimintoja, kuten 3D-tulostus, materiaalinkäsittely, hitsaus ja laserkaiverrus. Ne pystyvät parantamaan huomattavasti työsi ja tuotantosi tehokkuutta ja joustavuutta.
Ominaisuudet

Korkea tarkkuus
Toistettavuus
±0,02 mm
Räätälöity Z-akseli
0,1–0,8 m
Suuri hyötykuorma
Jalusta 4kg
Enintään 5 kg
Suurempi nopeus
Suurin lineaarinen nopeus 2m/s
(Telineen kuorma 5 kg)
Suuri varren span, erittäin tarkka 4-akselinen robottikäsivarsi ja helppokäyttöinen
Korkea tarkkuus
Toistettavuus: ±0,02 mm
Iso varren span
J1-akseli: 325 mm,J2-akseli: 275 mm
Räätälöity Z-akseli
Ylös-alas-iskun pituutta voidaan mukauttaa 0,1–0,8 metrin välille
Tilaa säästävä
Taajuusmuuttaja/ohjain on sisäänrakennettu
Yksinkertainen ja helppokäyttöinen
Uusi tulokas, joka ei tiennyt robottikäsivartta, voi myös olla helppokäyttöinen, käyttöliittymä avautuu.
Nopea
Sen nopeus on 2000 mm/s 4 kg:n kuormalla

Aiheeseen liittyvät tuotteet



Spesifikaatioparametri
SCIC Hitbot Z-Arm 4160B on SCIC Techin suunnittelema kevyt yhteistyörobotti, jota on helppo ohjelmoida ja käyttää, ja joka tukee SDK:ta. Lisäksi se tukee törmäyksen havaitsemista, eli se pysähtyy automaattisesti koskettaessaan ihmistä. Tämä on älykästä ihmisen ja koneen yhteistyötä ja korkea turvallisuustaso.
| Z-Arm 4160B -yhteistyörobottikäsivarsi | Parametrit |
| 1-akselisen varren pituus | 325 mm |
| 1 akselin kiertokulma | ±90° |
| 2-akselisen varren pituus | 275 mm |
| 2-akselinen kiertokulma | ±164° Valinnainen: 15–345 astetta |
| Z-akselin isku | 410 Korkeutta voidaan mukauttaa |
| R-akselin kiertoalue | ±1080° |
| Lineaarinen nopeus | 2000 mm/s (hyötykuorma 4 kg) |
| Toistettavuus | ±0,02 mm |
| Vakiohyötykuorma | 4 kg |
| Suurin hyötykuorma | 5 kg |
| Vapausaste | 4 |
| Virtalähde | 220V/110V50-60HZ mukautuu 48VDC huipputehoon 960W |
| Viestintä | Ethernet |
| Laajennettavuus | Sisäänrakennettu liikeohjain tarjoaa 24 I/O-liitäntää + laajennuspaikan käsivarren alle |
| Z-akselin korkeutta voidaan mukauttaa | 0,1 m ~ 0,8 m |
| Z-akselin vetämisen opetus | / |
| Sähköliitäntä varattu | Vakiokokoonpano: 24 * 23 awg (suojaamatonta) johtoa pistorasiapaneelista alemman varren kannen läpi Valinnainen: 2 φ4-tyhjiöputkea pistorasiapaneelin ja laipan läpi |
| Yhteensopivat HITBOT-sähkökäyttöiset tarttujat | Z-EFG-8S/Z-EFG-12/Z-EFG-20/Z-EFG-20S/Z-EFG-20F/Z-ERG-20C/Z-EFG-30/Z-EFG-50/Z-EFG-100 |
| Hengittävä valo | / |
| Toisen käden liikerata | Vakio: ±164° Valinnainen: 15–345 astetta |
| Valinnaiset lisävarusteet | / |
| Käytä ympäristöä | Ympäristön lämpötila: 0–45 °C Kosteus: 20–80 % suhteellinen kosteus (ei huurretta) |
| I/O-portin digitaalitulo (eristetty) | 9+3+kyynärvarren ojennus (valinnainen) |
| I/O-portti digitaalinen lähtö (eristetty) | 9+3+kyynärvarren ojennus (valinnainen) |
| I/O-portin analoginen tulo (4–20 mA) | / |
| I/O-portin analoginen lähtö (4–20 mA) | / |
| Robottikäden korkeus | 860 mm |
| Robottikäden paino | 410 mm:n isku, nettopaino 36,5 kg |
| Pohjan koko | 250 mm * 250 mm * 15 mm |
| Pohjan kiinnitysreikien välinen etäisyys | 200 mm * 200 mm neljällä M8 * 20 ruuvilla |
| Törmäyksen havaitseminen | √ |
| Vedä opetusta | √ |
Ihanteellinen valinta kevyisiin kokoonpanotehtäviin
Z-Arm XX60B on neliakselinen robottivarsi, jolla on suuri varren kärkiväli ja joka vie vähän tilaa. Se sopii erittäin hyvin työasemalle tai koneen sisään ja on ihanteellinen valinta kevyisiin kokoonpanotehtäviin.


Kevyt ja suuri kääntökulma

Tuotteen paino on noin 36,5 kg, sen enimmäiskuormitus voi olla jopa 5 kg, yhden akselin kiertokulma on ±90°, kahden akselin kiertokulma on ±164° ja R-akselin kiertoalue voi olla jopa ±1080°.
Suuri varren span, laaja käyttöalue

Z-varressa XX60B on pitkä varren jänneväli, yhden akselin pituus on 325 mm, kahden akselin pituus on 275 mm, ja sen lineaarinopeus voi olla jopa 2000 mm/s 4 kg:n kuormalla.


Joustava käyttöönotto, nopea vaihto
Z-Arm XX60B:llä on kevyen, tilaa säästävän ja joustavan käyttöönoton ominaisuudet. Se soveltuu käytettäväksi monissa sovelluksissa, eikä se muuta aiempaa tuotantoasettelua, mukaan lukien nopea prosessisekvenssin vaihto ja pienten erien tuotanto jne.
DragTeaching to Complete -ohjelma

Ohjelmisto perustuu graafiseen suunnitteluun, se sisältää pisteen, lähtösignaalin, sähköisen tarttujan, tarjottimen, viiveen, aliprosessin, nollauksen ja muita perustoimintomoduuleja. Käyttäjät voivat vetää moduulia ohjatakseen robottikäsivartta ohjelmointialueella. Käyttöliittymä on yksinkertainen, mutta toiminnot ovat tehokkaita.
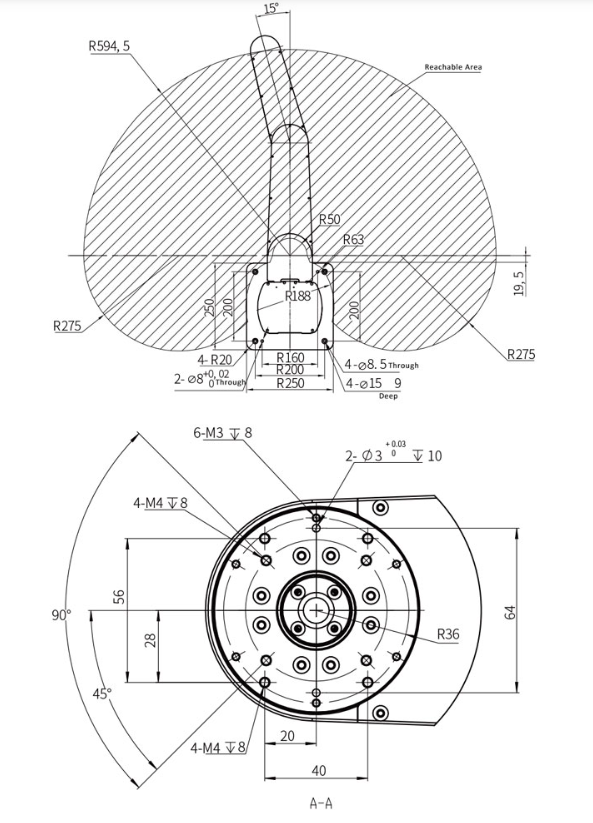
Liikealue M1-versio (kierrä ulospäin)
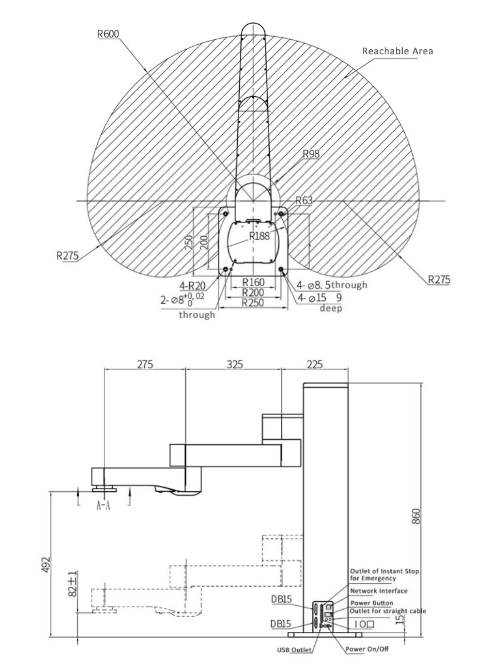
DB15-liittimen suositus

Suositeltu malli: Kullattu urosliitin ABS-kuorella YL-SCD-15M Kullattu naarasliitin ABS-kuorella YL-SCD-15F
Koko Kuvaus: 55mm * 43mm * 16mm
(Katso kuvaa 5)
Robottikäden ulkoisen käyttöympäristön kaavio

Liiketoimintamme






